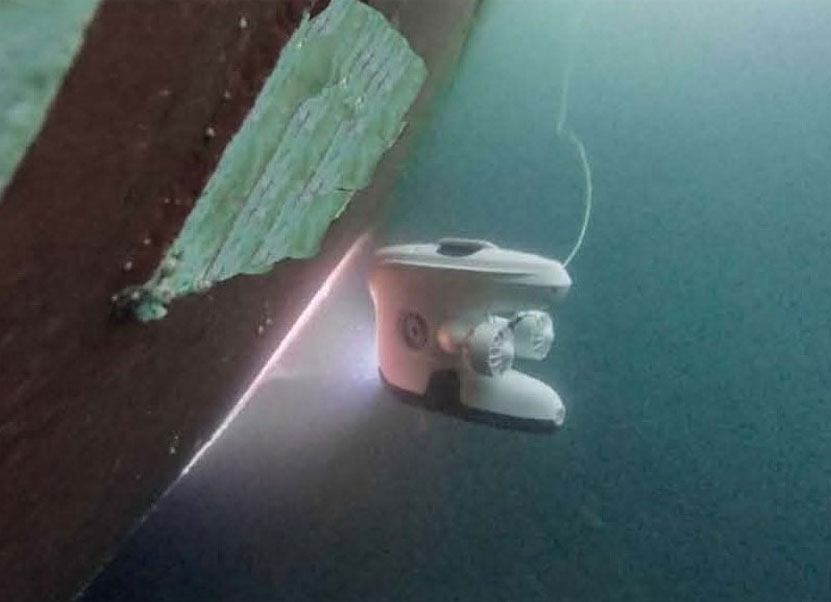
An advanced Remotely Operated Vehicle (ROV) has been developed for underwater hull
inspections of ships, submarines, and other underwater infrastructure, focusing on emergent
structural fault diagnosis and corrective maintenance. Equipped with high-definition cameras
and specialized sensors, the ROV can navigate complex environments to perform thorough
inspections, capturing real-time imagery and data to identify structural issues such as cracks
and corrosion. Its integration of sonar technology allows for effective operation in low visibility
conditions, enhancing safety by reducing the need for human divers. The ROV's portability
ensures rapid deployment, making it an efficient solution for timely inspections that prevent
costly repairs and ensure compliance with maritime safety standards.
Technical Specifications:
- General:
- Operating Depth : 50 m
- Size : 0.85 x 0.65 x 0.45 m (Length x Width x Height)
- Weight in Air : 20 kg (Approx.)
- Maximum Speed : 03 knots
- Propulsion:
- Electric Thrusters : 08 Electric Motor Thrusters
- Power System:
- Li-Ion Battery
- Unlimited (via tether)
- Camera & Underwater Lights:
- Camera : HD color video camera
- Lights : Underwater search lights
- SONAR Systems:
- High-resolution SONAR
- Sensors:
- Gyroscope, Accelerometer, Magnetometer, Temperature Sensor, Depth Sensor, Leak
Detection Sensor, Current and Voltage Sensors
- Navigation:
- Underwater GPS
- Dead Reckoning
- Robotic Manipulator:
- 3 degrees of freedom (operator controlled)
- Operator Console:
- Joystick Control Mechanism
- Real Time Videography with Recording
- Controls for all ROV Systems and Functions
- ROV Tether:
- 300m (Reeled out via motorized spool)